



Anbarda müxtəlif növ saxlama rəfləri var və saxlama və axtarış üsulları əsasən aşağıdakı kateqoriyalara bölünür, o cümlədən əl ilə saxlama və axtarış, forkliftin saxlanması və axtarışı, avtomatik saxlama və axtarış. Hal-hazırda bir çox müəssisə avtomatik anbar əməliyyatını həyata keçirmək istəyir, buna görə də avtomatlaşdırılmış anbar rəflərindən istifadə etmək istəyirlər. Məsələn, dörd yollu avtomobil rafı bir növ avtomatlaşdırılmış saxlama çarxıdır. Dörd tərəfli servis AGV anbara necə girib-çıxır? Haigris'in anbarda ağır rəf istehsal zavodu təhlil etdi.

Dörd tərəfli servis anbarı
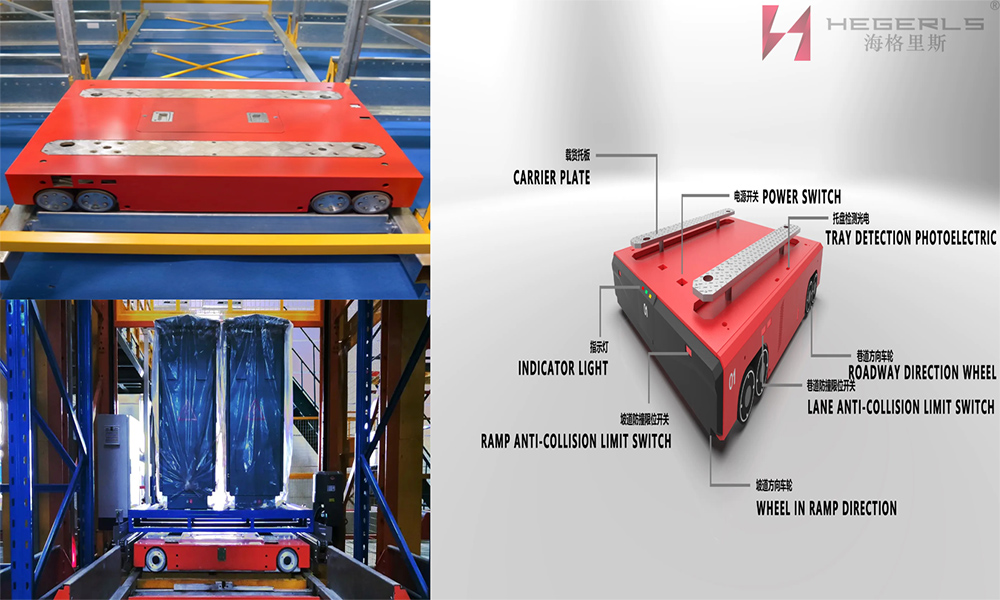
Dörd istiqamətli servis vaqonu 12 təkərlə təchiz olunub, onlar trek müstəvisi boyunca dörd istiqamətdə hərəkət edə və anbar təyyarəsində istənilən yük yerinə sərbəst çata bilirlər. Dörd istiqamətli servis avtomobilin kuzovunun istismar zamanı əyilməməsini təmin etmək üçün eyni vaxtda hər iki tərəfdən təkərlər tərəfindən idarə olunur və o, üçölçülü şelfdə uzununa və eninə relslər boyunca növbə ilə hərəkət edə bilər.

Eyni zamanda, dörd tərəfli servis yalnız uzununa deyil, həm də yanal hərəkət edə bilən ağıllı idarəetmə cihazıdır. Dörd tərəfli servis yüksək çevikliyə malikdir, iş yolunu öz istəyi ilə dəyişə bilər və servis vaqonlarının sayını artırmaq və ya azaltmaqla sistemin tutumunu tənzimləyə bilər. Lazım gələrsə, sistemin pik dəyərinə işləyən nəqliyyat vasitəsi komandasının qrafik rejimini qurmaqla, giriş və çıxış əməliyyatlarının darboğazını həll etməklə cavab verilə bilər və həmçinin bir-biri ilə əvəz edilə bilər, bir servis və ya lift uğursuz olduqda, digər Sistemin gücünə təsir etmədən əməliyyatı başa çatdırmaq üçün dispetçer sistemi vasitəsilə servis və ya liftlər göndərilə bilər. Bu cihaz həm aşağı axın, həm də yüksək sıxlıqlı saxlama, həmçinin yüksək axın və yüksək sıxlıqlı saxlama üçün uyğundur. Bu, daha çox səmərəlilik, xərc və resurslar əldə edə bilər.
Dörd tərəfli servis AGV anbara necə girib-çıxır?

1) Anbar üsulu
a) Ağıllı dörd tərəfli servisin texniki işçiləri əvvəlcə ağıllı dörd tərəfli servisi işə salır və hazır vəziyyətə gətirirlər. Ağıllı dörd istiqamətli servis gözləmə rejimindədir;
b) Ağıllı dörd tərəfli servisin seçilmə yerini təsdiq etdikdən sonra, WCS ağıllı dörd tərəfli servisin cari yeri və təyinat yerinə uyğun olaraq sürücülük marşrutunu planlaşdıracaq və sonra heyət malları ağıllı dörd tərəfli nəqliyyat vasitəsinə paylayacaq. WCS vasitəsilə servis;
c) İntellektual dörd istiqamətli servis alınan tapşırıq əmrinə uyğun olaraq çatdırılma tapşırığını yerinə yetirməyə başlayır;
d) Keçid cığırında ağıllı dördyollu şatl yerdəyişmə rejimində faktiki məsafəni qət edir. Sürmə prosesi zamanı o, avtomobilin gövdəsinin aşağı hissəsinin keçdiyi izləri davamlı olaraq skan edir. Keçdiyi hər kəsişmə mövqeyində yolları skan edərək qət etdiyi məsafəni mühakimə edir və kalibrləyir. O, təyinat yerinə yaxın olduqda, parklama mövqeyinin dəqiq yerləşdirilməsinə nail olmaq üçün yanal lazer sensoru vasitəsilə parklama mövqeyini dəqiq tənzimləyir;
e) Alt kanalda, ağıllı dörd tərəfli servis çarpaz yolu və yan kalibrləmə güzgü reflektorunu skan edə, nöqtə mövqeyini skan edərək sürücülük məsafəsini mühakimə edə və yoxlaya bilər və təyinat yerinə çatmaq üçün alt kanalda dəqiq yerləşdirmə nəzarətinə nail ola bilər;
f) Dörd istiqamətli ağıllı servis seçilmiş götürmə mövqeyinə çatdıqda, palet düşür, mallar rəfdə yerləşdirilir və WCS sisteminə çatdırılma tapşırığının tamamlandığı barədə məlumat verilir;
g) Ağıllı dörd istiqamətli servis tapşırıq təlimatlarını almağa davam edir və ya gözləmə zonasına qayıdır.
2) Çatdırılma üsulu
a) Ağıllı dörd tərəfli servisin texniki işçiləri əvvəlcə ağıllı dörd tərəfli servisi işə salır və hazır vəziyyətə gətirirlər. Ağıllı dörd istiqamətli servis gözləmə rejimindədir;
b) Ağıllı dörd tərəfli servisin seçilmə yerini təsdiq etdikdən sonra, WCS ağıllı dörd tərəfli servisin cari yeri və təyinat yerinə uyğun olaraq sürücülük marşrutunu planlaşdıracaq və sonra heyət toplama tapşırığını ağıllı dördlüyə göndərəcək. -WCS vasitəsilə gediş-gəliş;
c) Dörd istiqamətli ağıllı servis alınan tapşırıq əmrinə uyğun olaraq malları götürməyə başlayır;
d) Keçid cığırında ağıllı dördyollu şatl faktiki məsafədən yerdəyişmə rejimində hərəkət edir. Sürmə prosesi zamanı o, avtomobilin gövdəsinin aşağı hissəsinin keçdiyi izləri davamlı olaraq skan edir. Keçdiyi hər kəsişmə mövqeyində yolları skan edərək qət etdiyi məsafəni mühakimə edir və yoxlayır. Təyinat yerinə yaxınlaşarkən, o, dəqiq yerləşdirmə nəzarətinə və dayanmağa nail olmaq üçün yanal lazer sensoru vasitəsilə parklama mövqeyini dəqiq tənzimləyir;
e) Alt kanalda, ağıllı dörd tərəfli servis avtomobili çarpaz yolu və yan kalibrləmə güzgü reflektorunu skan edir, bu nöqtələri skan edərək sürücülük məsafəsini mühakimə edir və kalibrləyir və təyinat yerinə çatmaq üçün alt kanalda dəqiq yerləşdirmənin idarəsini həyata keçirir. .
Göndərmə vaxtı: 19 sentyabr 2022-ci il